Новости звезд












Формулы приведения примеры заданий. Как формулы приведения работают в задаче B11. Задачи с формулами приведения для самостоятельного решения
Определение. Формулами приведения называют формулы, которые позволяют перейти от тригонометрических функций вида к функциям аргумента . С их помощью синус, косинус, тангенс и котангенс произвольного угла можно привести к синусу, косинусу, тангенсу и котангенсу угла из интервала от 0 до 90 градусов (от 0 до радиан). Таким образом, формулы приведения позволяют нам переходить к работе с углами в пределах 90 градусов, что, несомненно, очень удобно.
Формулы приведения:

Для использования формул приведения существует два правила.
1. Если угол можно представить в виде (π/2 ±a) или (3*π/2 ±a), то название функции меняется sin на cos, cos на sin, tg на ctg, ctg на tg. Если же угол можно представить в виде (π ±a) или (2*π ±a), то название функции остается без изменений.
Посмотрите на рисунок ниже, там схематично изображено, когда следует менять знак, а когда нет

2. Знак приведенной функции остается прежним. Если исходная функция имела знак «плюс», то и приведенная функция имеет знак «плюс». Если исходная функция имела знак «минус», то и приведенная функция имеет знак «минус».
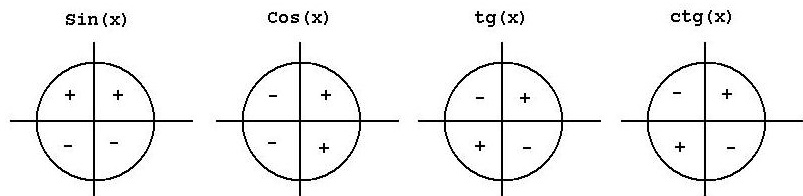
На рисунке ниже представлены знаки основных тригонометрических функций в зависимости от четверти.
Пример:
Вычислить
Воспользуемся формулами приведения:
Sin(150˚) находится во второй четверти, по рисунку видим что знак sin в этой четверти равен "+". Значит у приведенной функции тоже будет знак «+». Это мы применили второе правило.
Теперь 150˚ = 90˚ +60˚. 90˚ это π/2. То есть имеем дело со случаем π/2+60, следовательно по первому правилу меняем функцию с sin на cos. В итоге получаем Sin(150˚) = cos(60˚) = ½.
Для использования формул приведения существует два правила.
1. Если угол можно представить в виде (π/2 ±a) или (3*π/2 ±a), то название функции меняется sin на cos, cos на sin, tg на ctg, ctg на tg. Если же угол можно представить в виде (π ±a) или (2*π ±a), то название функции остается без изменений.
Посмотрите на рисунок ниже, там схематично изображено, когда следует менять знак, а когда нет.
2. Правило «каким ты был, таким ты и остался».
Знак приведенной функции остается прежним. Если исходная функция имела знак «плюс», то и приведенная функция имеет знак «плюс». Если исходная функция имела знак «минус», то и приведенная функция имеет знак «минус».
На рисунке ниже представлены знаки основных тригонометрических функций в зависимости от четверти.

Вычислить Sin(150˚)
Воспользуемся формулами приведения:
Sin(150˚) находится во второй четверти, по рисунку видим что знак sin в этой четверти равен +. Значит у приведенной функции тоже будет знак «плюс». Это мы применили второе правило.
Теперь 150˚ = 90˚ +60˚. 90˚ это π/2. То есть имеем дело со случаем π/2+60, следовательно по первому правилу меняем функцию с sin на cos. В итоге получаем Sin(150˚) = cos(60˚) = ½.
При желании все формулы приведения можно свести в одну таблицу. Но все же легче запомнить эти два правила и пользоваться ими.
Нужна помощь в учебе?

Предыдущая тема:
Тригонометрия.Формулы приведения.
Формулы приведения не нужно учить их нужно понять. Понять алгоритм их вывода. Это очень легко!
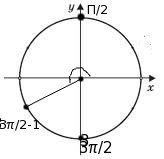
Возьмем единичную окружность и расставим все градусные меры (0°; 90°; 180°; 270°; 360°) на ней.
Разберем в каждой четверти функции sin(a) и cos(a).
Запомним, что функцию sin(a) смотрим по оси Y, а функцию cos(a) по оси X.
В первой четверти видно, что функция sin(a)>0
И функция cos(a)>0
Первую четверть можно описать через градусную меру, как (90-α) или (360+α).

Во второй четверти видно, что функция sin(a)>0
, потому что ось Y положительна в этой четверти.
А функция cos(a) , потому что ось X отрицательна в этой четверти.
Вторую четверть можно описать через градусную меру, как (90+α) или (180-α).

В третьей четверти видно, что функции sin(a) Третья четверть можно описать через градусную меру, как (180+α) или (270-α).

В четвертой четверти видно, что функция sin(a) , потому что ось Y отрицательна в этой четверти.
А функция cos(a)>0
, потому что ось X положительна в этой четверти.
Четвертую четверть можно описать через градусную меру, как (270+α) или (360-α).

Теперь рассмотрим сами формулы приведения.
Запомним простой алгоритм
:
1. Четверть.
(Всегда смотрите в какой вы четверти находитесь).
2. Знак.
(Относительно четверти смотрите положительны или отрицательный функции косинуса или синуса).
3. Если у вас есть в скобочках (90° или π/2) и (270° или 3π/2), то функция меняется
.
И так начнем разбирать по четвертям данный алгоритм.
Выясни чему будет равно выражение cos(90-α)
Рассуждаем по алгоритму:
1. Четверть первая.
Будет cos(90-α) = sin(α)
Выясни чему будет равно выражение sin(90-α)
Рассуждаем по алгоритму:
1. Четверть первая.
Будет sin(90-α) = cos(α)
Выясни чему будет равно выражение cos(360+α)
Рассуждаем по алгоритму:
1. Четверть первая.
2. В первой четверти знак у функции косинуса положительный.
Будет cos(360+α) = cos(α)
Выясни чему будет равно выражение sin(360+α)
Рассуждаем по алгоритму:
1. Четверть первая.
2. В первой четверти знак у функции синуса положительный.
3. В скобочках нет (90° или π/2) и (270° или 3π/2), то функция не меняется.
Будет sin(360+α) = sin(α)
Выясни чему будет равно выражение cos(90+α)
Рассуждаем по алгоритму:
1. Четверть вторая.
3. В скобочках есть (90° или π/2), то функция меняется с косинуса на синус.
Будет cos(90+α) = -sin(α)
Выясни чему будет равно выражение sin(90+α)
Рассуждаем по алгоритму:
1. Четверть вторая.
3. В скобочках есть (90° или π/2), то функция меняется с синуса на косинус.
Будет sin(90+α) = cos(α)
Выясни чему будет равно выражение cos(180-α)
Рассуждаем по алгоритму:
1. Четверть вторая.
2. Во второй четверти знак у функции косинуса отрицательный.
3. В скобочках нет (90° или π/2) и (270° или 3π/2), то функция не меняется.
Будет cos(180-α) = cos(α)
Выясни чему будет равно выражение sin(180-α)
Рассуждаем по алгоритму:
1. Четверть вторая.
2. Во второй четверти знак у функции синуса положительный.
3. В скобочках нет (90° или π/2) и (270° или 3π/2), то функция не меняется.
Будет sin(180-α) = sin(α)
Рассуждаю про третью и четвертую четверть подобным образом составим таблицу:

Подписывайтесь на канал на YOUTUBE и смотрите видео, подготавливайтесь к экзаменам по математике и геометрии с нами.
Как не заучивать формулы приведения.
При решении тригонометрических уравнений или совершении тригонометрических преобразований первым делом нужно минимизировать количество различных аргументов тригонометрических функций. Для этого нужно все углы привести к углам первой четверти, воспользовавшись формулами приведения . Я хочу познакомить вас с мнемоническим правилом, которое позволяет не заучивать . Это правило в шутку называется "Лошадиное правило".
В этом ВИДЕОУРОКЕ я расскажу, как пользоваться этим правилом: приводить тригонометрическую функцию произвольного угла к углу первой четверти, освободив себя от необходимости запоминать формулы приведения:
Итак, "лошадиное правило " звучит так:
Если мы откладываем угол от вертикальной оси , лошадь говорит "да" (киваем головой вдоль оси OY) и приводимая функция меняет свое название : синус на косинус, косинус на синус, тангенс на котангенс, котангенс на тангенс.
Если мы откладываем угол от горизонтальной оси , лошадь говорит "нет" (киваем головой вдоль оси OХ) и приводимая функция не меняет свое название .
Знак правой части равенства совпадает со знаком приводимой функции, стоящей в левой части равенства.
Приведу несколько примеров использования формул приведения:
1 . Найти значение выражения:
1. Выделим целую часть в дроби :
2. Так как период функции равен , выделим "холостые обороты":
![]()
Теперь наш аргумент находится в пределах от нуля до , и самое время применить "лошадиное правило":
![]()
Чтобы попасть в точку, соответствующую углу поворота на , мы сначала совершаем поворот на радиан, а потом из этой точки откладывает угол радиан:
 Мы отложили угол от горизонтальной оси (лошадь говорит "нет") - не меняет свое названия, угол расположен в третьей четверти, в которой косинус отрицателен, следовательно приводимая функция отрицательна. Получаем:
Мы отложили угол от горизонтальной оси (лошадь говорит "нет") - не меняет свое названия, угол расположен в третьей четверти, в которой косинус отрицателен, следовательно приводимая функция отрицательна. Получаем:
![]()
2 . Найти значение выражения:
![]()
Разберемся по отдельности с каждой функцией:
Мы сначала совершаем поворот на радиан, а затем откладываем угол 1 радиан от вертикальной оси в отрицательном направлении и попадаем в третью четверть:
 Следовательно, приводимая функция меняет свое название, приводимая функция больше нуля (тангенс угла третьей четверти больше нуля):
Следовательно, приводимая функция меняет свое название, приводимая функция больше нуля (тангенс угла третьей четверти больше нуля): ![]() .
.
 Сначала совершаем поворот на радиан, а затем из этой точки двигаемся на 1 радиан в отрицательном направлении. Откладываем угол 1 радиан от горизонтальной оси (синус не меняет свое название) и попадаем во вторую четверть, в которой синус больше нуля:
Сначала совершаем поворот на радиан, а затем из этой точки двигаемся на 1 радиан в отрицательном направлении. Откладываем угол 1 радиан от горизонтальной оси (синус не меняет свое название) и попадаем во вторую четверть, в которой синус больше нуля:

